액티비티 다이어그램의 구성요소와 특징
Edraw Content Team
액티비티 다이어그램 구성요소와 특징 이해하기
본문을 통해 액티비티 다이어그램에 대해 알아보세요. EdrawMax는 AI 기능을 탑재하고 있어 다이어그램 작성에 특화되여 있습니다. 지금 바로 EdrawMax AI 기능을 이용하여 다이어그램을 시작해 보세요!
액티비티 다이어그램은 시스템이나 프로세스의 활동 간의 흐름을 시각화하여 표현하는 데 활용되는 도구입니다. 특히, 처리 로직이나 조건에 따른 처리 흐름을 명확하게 정의하는 데 적합하여, 복잡한 시스템을 이해하는 데 큰 도움을 줍니다.
이번 글에서는 액티비티 다이어그램의 핵심 개념과 주요 구성 요소를 함께 살펴보고, 이를 효과적으로 작성할 수 있는 프로그램과 작성 방법을 소개해 드리겠습니다. 바로 만나보시죠!
이드로우맥스
올인원 다이어그램 소프트웨어
- 강력한 호환성: Visio,MS office 등 파일 호환 가능
- 다양한 운영체제: (윈도우,맥,리눅스,ios,android)
Part 1: 액티비티 다이어그램이란?

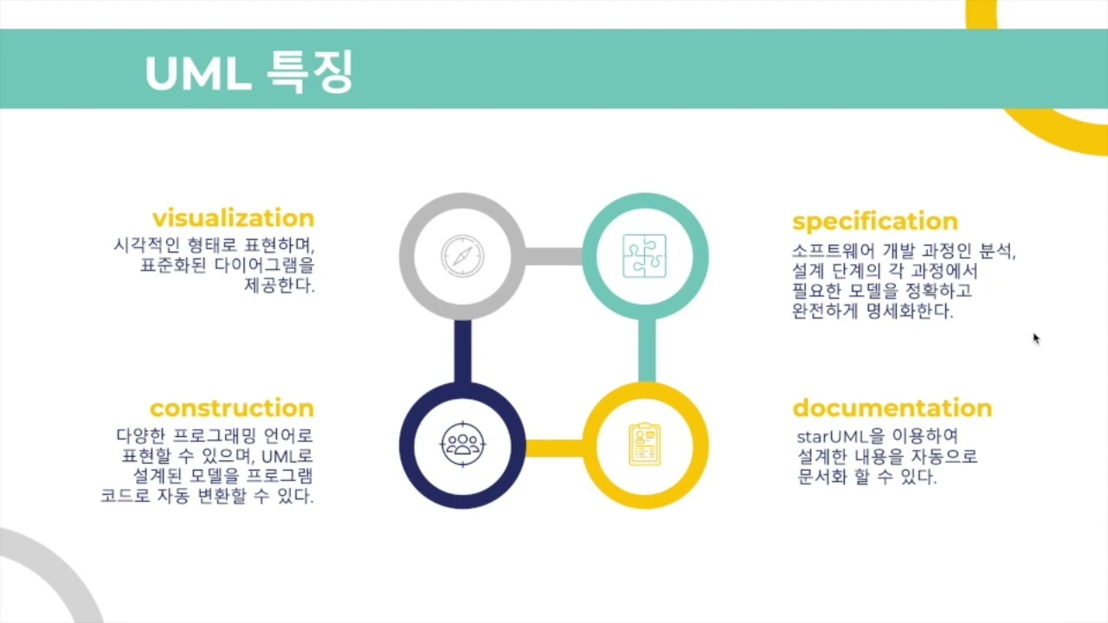
액티비티 다이어그램은 UML(Unified Modeling Language)의 일부로, 시스템이나 프로세스의 활동 흐름을 시각적으로 표현하는 도구입니다. 처리 로직이나 조건에 따른 처리 흐름을 명확하게 설명하며, 소프트웨어의 시스템 동작을 문서화하는 데 활용됩니다.
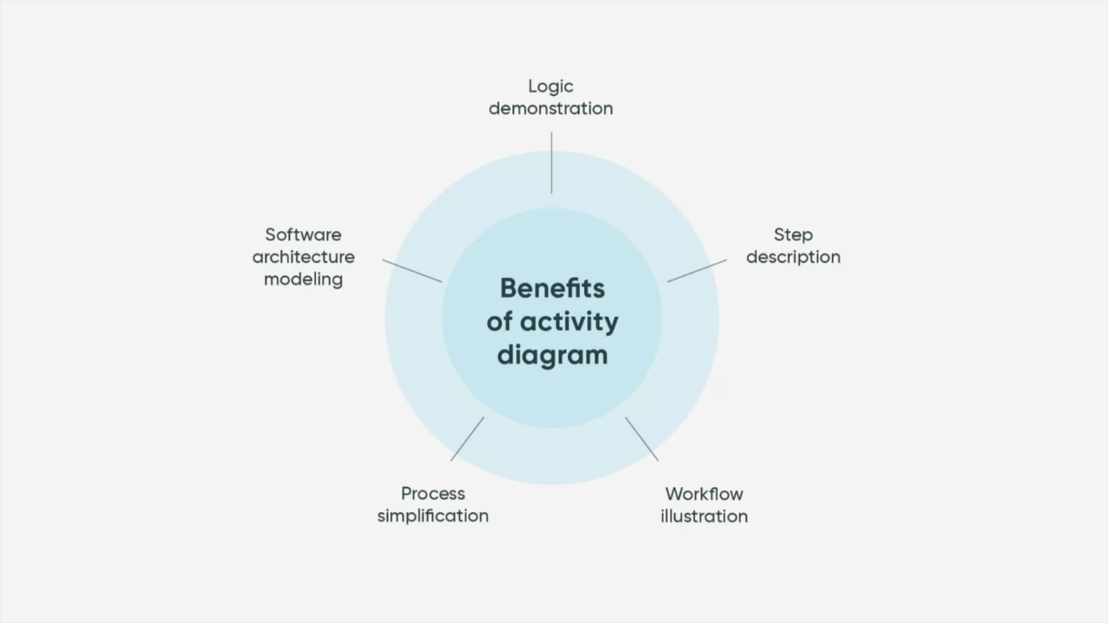
액티비티 다이어그램은 복잡한 시스템을 이해하고, 문제점을 신속히 찾아내는 데 도움이 됩니다. 각 단계의 연결성과 흐름을 보여줌으로써 전체적인 구조를 파악하는 데 유용하며, 이를 통해 더 효율적인 시스템 개선 방안을 도출할 수 있습니다.
Part 2: 액티비티 다이어그램 구성요소&특징
1. 구성요소
활동 다이어그램은 주로 다음의 구성요소로 이루어져 있습니다:
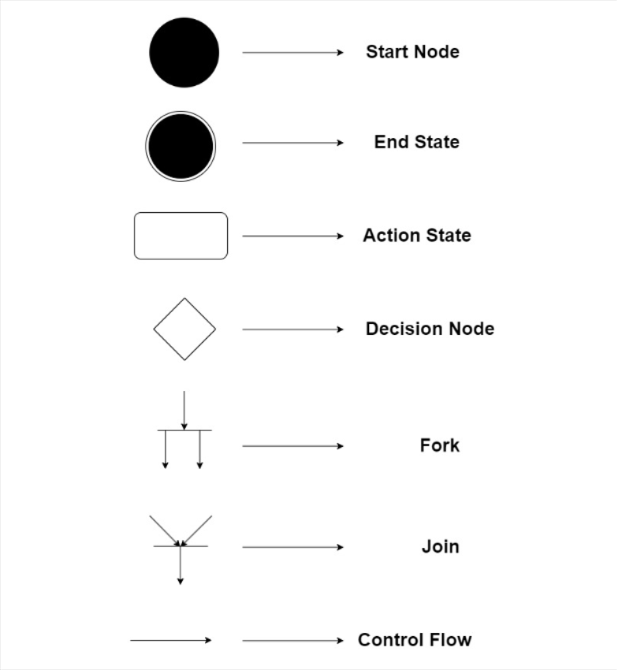
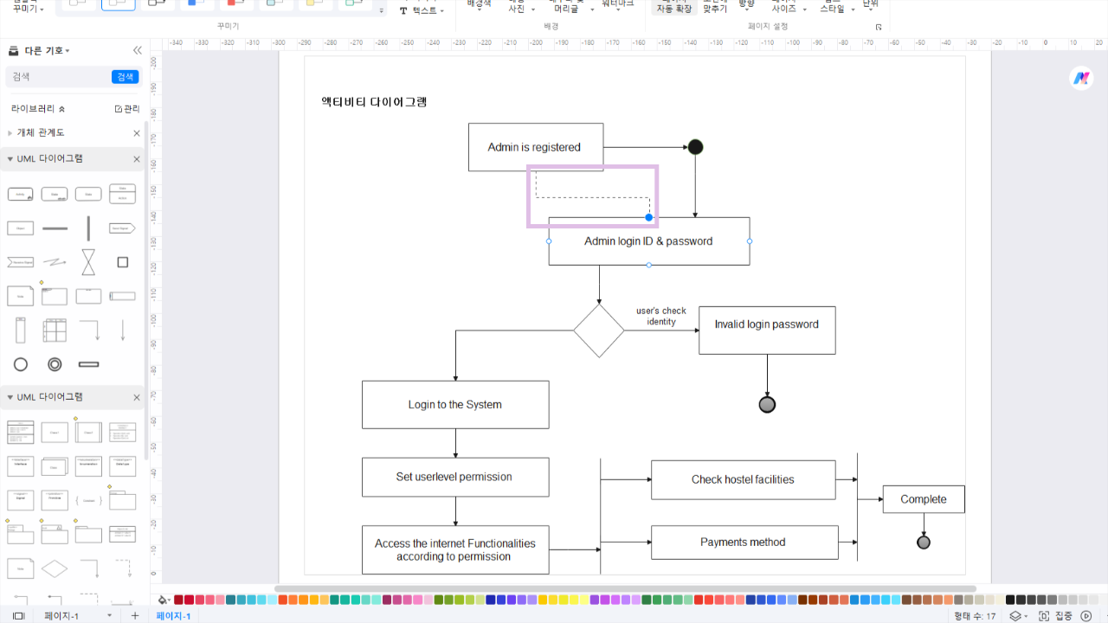
시작 노드(Start Node): 프로세스 시작을 나타내는 요소로 일반적으로 원형으로 표현됩니다.
엔드 스테이트(End State): 원 안에 더 작은 원형으로 표현되며, 프로세스의 마지막 단계를 나타냅니다.
액션 스테이트(Action State): 액티비티 다이어그램에서 특정 작업이나 활동을 나타내는 요소입니다. 직사각형으로 표현되며, 활동의 이름이 내부에 기록됩니다.
결정 노드(Decision Node): 액티비티 다이어그램에서 조건에 따른 분기점을 나타내는 요소입니다. 마름모 형태로 표현되며, 여러 개의 출력 경로를 가질 수 있습니다.
포크(Fork): 한 흐름이 병렬로 분리되는 지점을 나타내는 요소입니다. 직선으로 표현되며, 여러 개의 액션 스테이트로 나뉩니다.
조인(Join): 병렬로 분리된 흐름이 다시 합쳐지는 지점을 나타내는 요소입니다. 직선으로 표현되며, 여러 개의 액션 스테이트가 하나로 합쳐집니다.
컨트롤 플로우(Control Flow): 액션 스테이트 간의 흐름을 나타내는 요소입니다. 화살표로 표현되며, 한 액션 스테이트에서 다른 액션 스테이트로 이동하는 경로를 나타냅니다.
2. 특징
시스템의 동작 흐름을 시각적으로 표현하여 복잡한 로직을 쉽게 이해할 수 있습니다.
각 액티비티 간의 관계와 전체 흐름을 명확하게 파악할 수 있습니다.
분기와 병합 등 다양한 상황을 표현할 수 있어, 실제 동작을 정확하게 모델링할 수 있습니다.
문제점이나 개선점을 찾아내는 데 유용하며, 시스템의 효율성을 향상하는 데 도움이 됩니다.
Part 3: 액티비티 다이어그램 작성 도구 이드로우 맥스
이드로우 맥스(EdrawMax)는 활동 다이어그램을 작성하는 데 매우 효율적인 도구로 잘 알려져 있습니다. 다양한 그래픽 편집 기능을 제공하며, 사용하기 쉬운 직관적인 인터페이스와 풍부한 템플릿을 제공합니다.
이드로우 맥스(EdrawMax)를 이용한 액티비티 다이어그램 작성 방법은 다음과 같습니다.
Step 1: 이드로우 맥스(EdrawMax) 프로그램을 실행합니다.
Step 2: 상단에 있는 + 신규 버튼 메뉴에서 UML도를 선택합니다.
Step 3: 왼쪽의 도구상자에서 필요한 구성요소를 드래그 앤 드롭하여 작업 영역에 놓습니다.
Step 4: 각 요소를 클릭하여 이름을 지정하고, 속성을 수정할 수 있습니다.
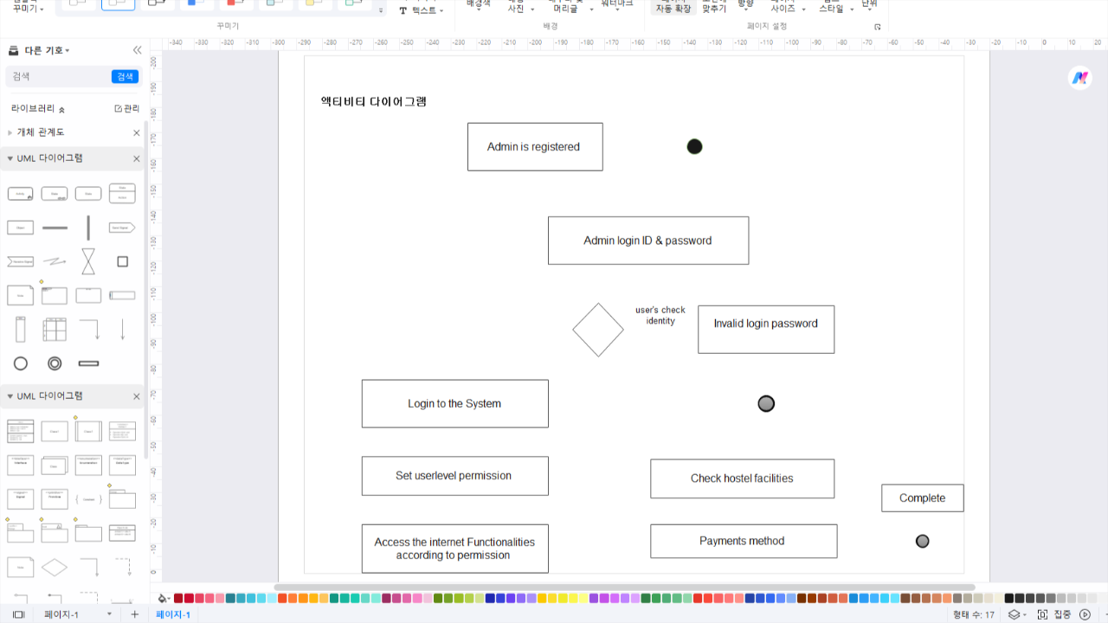
Step 5: 요소 간의 연결은 드래그하여 시작 요소에서 끝 요소로 이동시키면 두 요소가 연결됩니다.
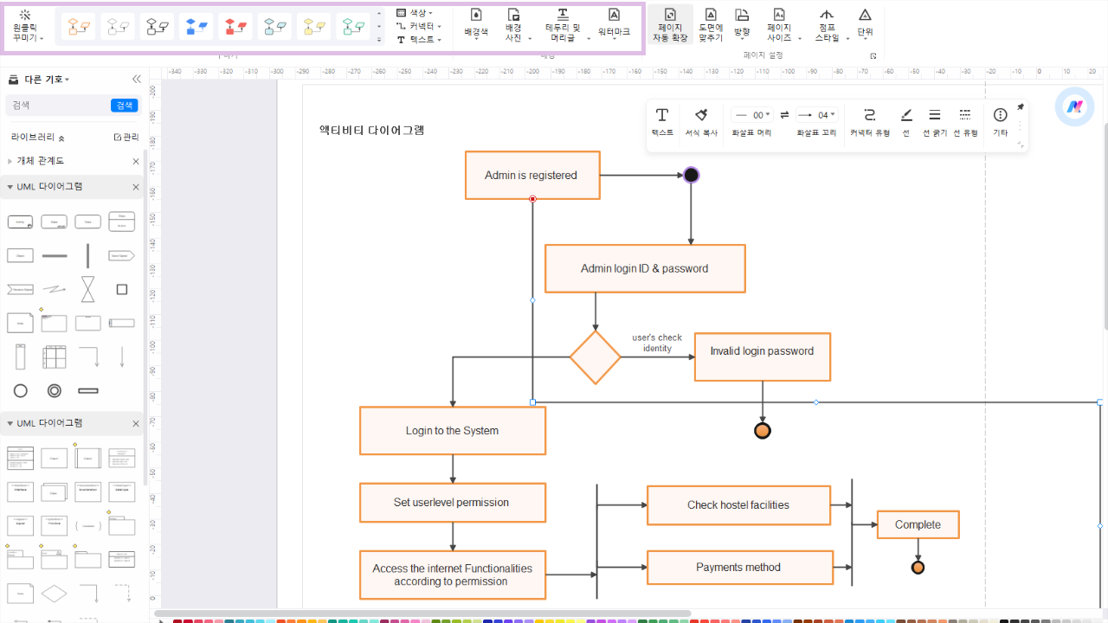
Step 6: 모든 요소가 적절하게 연결되었는지 확인하고, 디자인 기능이 필요한 경우 상단 메뉴에 있는 다양한 디자인 요소들을 통해 수정을 합니다.
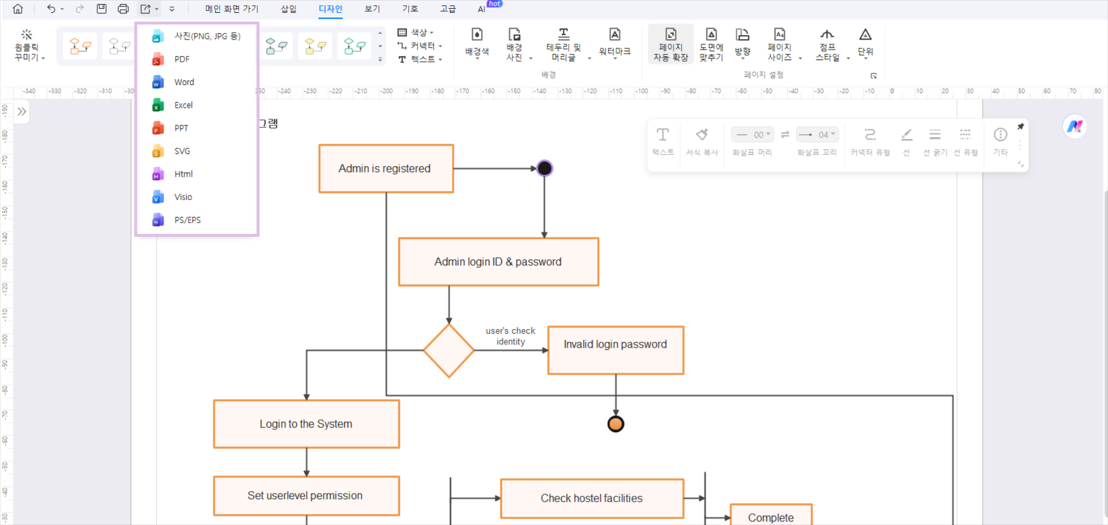
Step 7: 작업이 완료되면 상단 메뉴에서 다양한 형식으로 활동 다이어그램을 저장할 수 있습니다.
이처럼 이드로우 맥스(EdrawMax)를 활용하면 손쉽게 다이어그램을 작성할 수 있습니다.
액티비티 다이어그램은 시스템의 흐름을 명확하게 이해하고, 문제점을 효과적으로 찾아내는 필수 도구입니다. 복잡한 프로세스를 시각화하여, 전체적인 흐름을 쉽게 파악할 수 있습니다. 이를 통해 시스템의 성능을 향상하고, 효율적인 개선 방안을 도출하는 데 큰 도움이 됩니다.
여기에 이드로우 맥스(EdrawMax)와 같은 도구를 활용하면 어려운 액티비티 다이어그램을 더욱 쉽게 작성할 수 있습니다. 사용자의 생산성을 향상하는 좋은 도구를 적절하게 활용하여 프로젝트 관리 능력을 한 단계 더 업그레이드해 보세요!
기억하세요, 파비콘이라는 이 작은 아이콘 하나로 여러분의 웹사이트가 갖는 이미지가 크게 달라질 수 있습니다. 이제 여러분도 멋진 파비콘을 만들어 웹사이트의 첫인상을 한층 더 돋보이게 할 준비가 되셨나요? 오늘 알게된 내용을 토대로 멋진 파비콘을 만들어보시길 바랍니다. EdrawMax는 여러분의 웹사이트가 브라우저 속에서 한층 더 빛나길 응원합니다!
질문1. 액티비티 다이어그램과 순서도의 차이는 무엇입니까?
액티비티 다이어그램은 시스템 내에서 이루어지는 활동의 흐름과 그들 간의 상호 작용을 표현합니다. 즉, 다양한 시스템 활동들이 어떻게 워크플로를 구성하는지에 초점을 맞춥니다. 한편, 순서도는 이벤트나 프로세스, 시스템이 진행되는 일련의 단계를 표현합니다. 이는 각 단계가 어떻게 연결되는지에 초점을 두는 방식입니다.
질문2. 액티비티 다이어그램은 두 개의 시작점이 있을 수 있나요?
액티비티 다이어그램에서는 시작점을 나타내는 초기 노드가 둘 이상 존재할 수 있습니다. 초기 노드는 채워진 원으로 표현되며, 다이어그램에서 활동이 시작되는 지점을 표시합니다. 반면에, 최종 노드는 활동이 끝나는 지점을 나타내며, 그 종류에는 두 가지가 있습니다.
질문3. 시퀀스 다이어그램과 액티비티 다이어그램 중 어느 것이 더 좋나요?
시퀀스 다이어그램과 액티비티 다이어그램은 각각 다른 목적에 맞게 사용됩니다. 시퀀스 다이어그램은 한 객체에서 다른 객체로의 메시지 흐름을 중점적으로 보여주며, 주로 동적 모델링에 사용됩니다. 반면에 액티비티 다이어그램은 한 활동에서 다른 활동으로의 메시지 흐름을 보여주며, 기능 모델링에 주로 사용됩니다. 그러므로 어느 것이 더 좋다고 단정지을 수 없으며, 사용자의 목적과 요구에 따라 적절한 다이어그램을 선택해야 합니다.
관련 글

